상하좌우 움직일 수 있는 카메라를 집에 설치해볼까 싶어서, 서보모터 브라킷을 구매한지 어언 1년이 지났다.
구매할 시점에는 무언가 하려고 했지만, 알리의 싼 가격으로 구매하는 장점과 달리, 배송이 거의 2달 가까이 걸리니, 그 사이에 그 니즈는 시들해져버리고, 도착한 부품은 계속 쌓여만 간다. 취미생활이 아두이노로 무엇을 만드는 것이 아니라, 부품 구매하기가 되어버린 것이 현실이다.
구매한 SG90에 맞다고 하는 서보모터 마운트 브라킷은 이렇게 생겼다. 아주 단순하기는 한데, 볼트 너트가 많이 들어있다.

이 브라킷을 끼워넣어보려니, 생각보다 사이즈가 맞지 않는듯.... 했으나, 사진을 잘 보니 대충(?)은 맞아 들어간다.. 단지, 서버모터에 끼워져 있는 명칭을 모르겠는데, 모터에 꽂혀지는 플라스틱 막대의 사이즈는 여기에 맞지 않아서, 칼로 좀 잘라줘야지만 된다.
필요부품
- 브라킷(1달러): https://www.aliexpress.com/item/4000389243232.html
- 서보모터X2개(2개 3달러 안한듯): https://www.aliexpress.com/item/4000506860345.html
서보모터는 아래와 같이 결합하였다. 모양을 잘 보면 어떻게 결합할 수 있는지 확인 가능하다. 처음에는 딱 안 맞는 것 같아서 잘못 산 것인가 싶었는데.... 나사로 조이고 나니, 생각보다 탄탄하게 사용할 수 있었다. 서보모터를 결합하면서 생각되어야 하는 것이, 서보보터의 현재 위치가 어디인지 모르기 때문에 나중에 결합 후에 이동하는 각도가 이상하게 작동될 수 있을 것 같다.
재분리할 것을 생각하고 현재는 그냥 GO한다. 우선 돌아가게 한 후에 재조정하자.
브라킷의 조립 방법은 아래 사진으로 대체한다.






브레드보드 연결

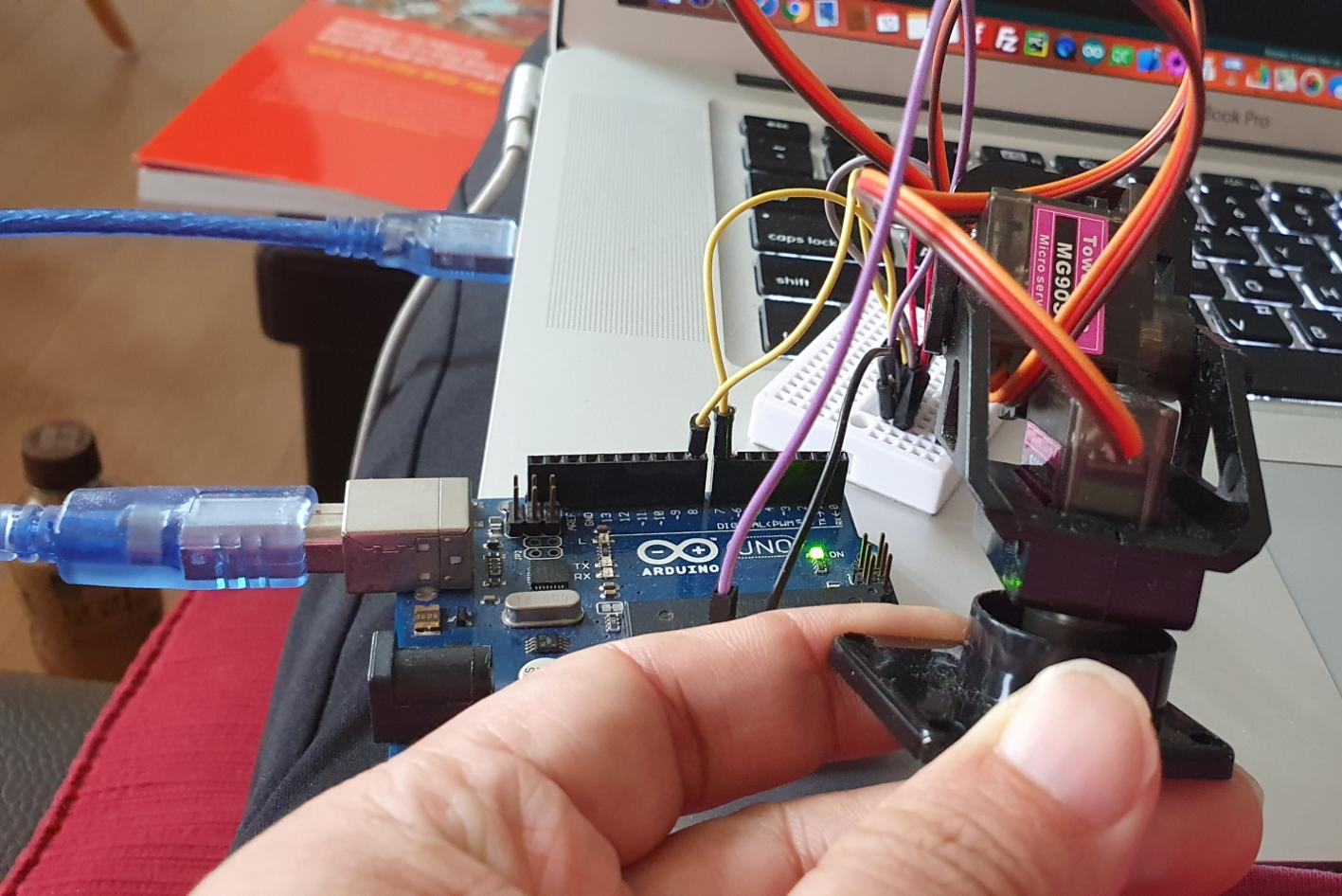
서보모터를 움직일 때 잡음제거를 위해서 콘덴서를 하나씩 달도록 했는데, 지금은 그것은 제외하였다. 복잡한 느낌이 들어서, 나중에 적용하자. 서보모터를 움직이기 위한 것은 기존 설명을 참고(https://makejarvis.tistory.com/34)하자.
서보모터를 2개를 연결하였다. 제어는 7번과 8번 PIN으로 연결하였다.
소스코드
좌우 이동 후 상하로 움직이는 것을 반복하도록 하였다.
#include <Servo.h>
#define PIN_SERVO1 7
#define PIN_SERVO2 8
Servo myservo1, myservo2;
void setup()
{
myservo1.attach(PIN_SERVO1);
myservo2.attach(PIN_SERVO2);
}
void loop()
{
int pos;
for(pos = 10; pos <= 170; pos++) {
myservo1.write(pos);
delay(15);
}
for(pos = 10; pos <= 170; pos++) {
myservo2.write(pos);
delay(15);
}
for(pos = 170; pos >= 10; pos--) {
myservo2.write(pos);
delay(15);
}
for(pos = 170; pos>=10; pos--) {
myservo1.write(pos);
delay(15);
}
}
잡담
상하좌우 움직이는 서보모터 브라켓. 카메라 달고, 폰으로 제어를 할 수 있도록 해야 겠다.
'아두이노 > 아두이노 일반' 카테고리의 다른 글
| [아두이노] TMP36 으로 온도계 만들기 (0) | 2020.05.11 |
|---|---|
| 초간단 wifi 카메라 ESP32-CAM 사용하기 (6) | 2020.05.10 |
| 서보모터(MG90S) 사용 (0) | 2020.05.10 |
| 구글 크롬 T-REX Runner 게임 자동으로 아두이노 (0) | 2020.04.10 |
| 샤오미 공기청정기에 사용된다는 미세먼지 센서를 이용한, 아두이노 초미세먼지 측정기 만들기(PMS 7003) (0) | 2019.12.29 |