반응형
오랫동안 기다려서 도착한 모터드라이브 모듈. 거진 5개월만에 도착했다.
주문을 하고 잊고 있었는데.... 코로나 때문에 어딘가를 돌고 돌다가 나에게 도착했는 것 같다. 포장지를 보면, 땡볕에 오래 방치가 되어서인지 인쇄된 감광종이 전체가 검게 되어 있어서 주소를 찾기가 어려운 상태였다.
어렴풋이 보이는 주소를 갖고 5개월만에 배달되어온 것이 신기했다. 난 주문한 것도 잊고 있었던 터라...
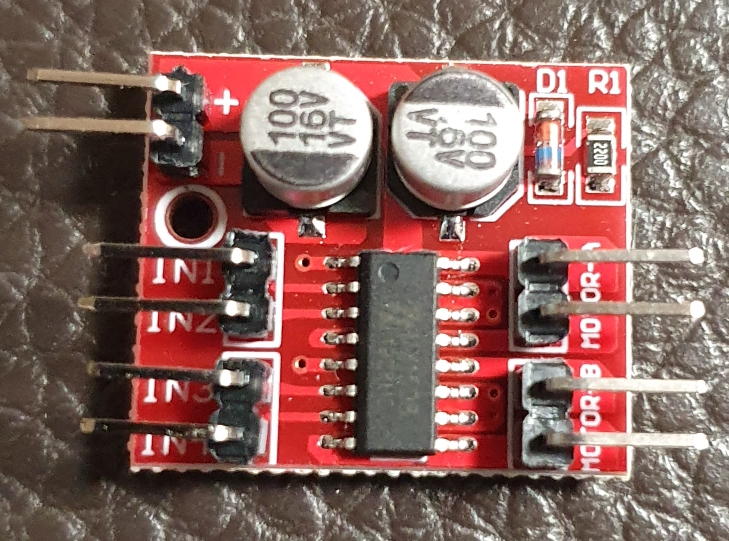
받은 모듈의 사진은 다음과 같다. 모델명과 스펙 등에 대한 내용은 수개월 전에 적은 이전글(3일차)을 참고 바란다.

아두이노 우노와 점퍼로 연결하기 위해서 헤드핀을 연결하였다. 당연히 땜질 했다.
지금 이 글은 PC가 아닌 폰으로 적고 있는 것이라서, fritzing으로 보드연결과 회로도를 추가하지 못하였다. 우선 하드웨어 연결을 먼저하고 나중에 코딩을 하면서 해당 내용을 추가하려한다.
이제 아두이노 우노와 모터를 연결해보자.
이 글을 적다가 일반적인 모터 움직이는 것부터 기록을 남기려 새로운 글을 먼저 적는 것으로 순서를 바꾼다. 안 적어두면 한참 지나고 난뒤에 기억이 안나서.. ^^
반응형
'아두이노 > 밸런싱로봇' 카테고리의 다른 글
| 아두이노로 2바퀴 밸런싱 로봇 만들기(3일차) (0) | 2020.02.02 |
|---|---|
| 아두이노로 2바퀴 밸런싱 로봇 만들기(2일차) (0) | 2020.01.05 |
| 아두이노로 2바퀴 밸런싱 로봇 만들기 1일차 (0) | 2020.01.04 |